
Tipy/Triky
Snažíme se poskytnout co nejlepší služby všem zákazníkům. Občas si člověk přes veškeré video návody na Youtube neví rady. Zde se budeme snažit vysvětlit základy stavby dronu od jeho sestavení, základního nastavení a případné řešení vzniklých problémů (postupně budou přidávány další informace)
- FPV Koptéra nejde připojit k PC:
Řadě z vás se určitě stává, že dron neboli koptéra, kterou chcete nastavit v PC přes konfigurátor Betaflight, Emuflight, Inav apod nejde připojit. Jakoby nebyla vůbec připojená i přes všechny nainstalované drivery, které konfigurátory nabízí. První možnost je, že používáte tzv. nedatový kabel - pouze nabíjecí, který neobsahuje datové připojení a zde je nutné zkusit jiný kabel USB. Pokud ani to nepomůže, chyba je nejspíše v ovladačích, které se sice instalují, ale operační systém je správně nepřiřadí. Zde máme šanci na nápravu v podobě softwaru, který dokáže tento problém odstranit. Program má název Immpulse Driver Fixer.
Můžete jej stáhnout ZDE
Program nevyžaduje instalaci a po jeho spuštění začne automaticky hledat připojené FC - jednotky tzn. že před samotným spuštěním je zapotřebí mít dron připojen přes datový kabel k PC. Program opraví chybu přiřazení driveru v operačním programu a převede jednotku do tzv. DFU módu, který je určen pro flashovaní řidícího (upgrade) softwaru procesoru jednotky. Jednotku poté připojíme jednoduše ke konfigurátoru tím, že ji odpojíme a opětovně připojíme k USB počítače a tím dojde ke zrušení módu DFU. V příslušném konfigurátoru se následně již zobrazí číslo portu, na kterém se letová jednotka nachází a lze se k ní již připojit.
Základní nastavení FPV dronu:
Betaflight je populární open-source firmware a konfigurační nástroj pro FPV koptéry. Následující návod popisuje, jak nastavit FPV dron v Betaflight konfigurátoru.
-
Příprava:
- Stáhněte a nainstalujte Betaflight Configurator z GitHubu pro váš operační systém.
- Ověřte, že váš dron je vypnutý a všechny vrtule jsou demontovány.
- Připravte si USB kabel pro připojení dronu k počítači.
-
Připojení dronu:
- Připojte dron pomocí USB k počítači.
- Otevřete Betaflight Configurator a klikněte na "Connect". Dron by se měl automaticky připojit.
-
Pro nastavení polohy gyroskopu na FPV dronu v konfigurátoru Betaflight je potřeba provést následující kroky:
1. V menu vyberte záložku "Setup" a poté "Calibration".
2. Zvolte "Accelerometer" a umístěte dron na rovný povrch, aby mohl být kalibrován.
3. Klepněte na tlačítko "Calibrate Accelerometer" a postupujte podle instrukcí.
4. Po dokončení kalibrace gyroskopu se přepněte na záložku "Configuration".
5. Najděte sekci "Gyroscope" a zkontrolujte, zda je správně nastavena osa gyroskopu (Yaw, Pitch, Roll).
6. Pokud je to potřeba, můžete také provést kalibraci kompasu v sekci "Compass".
-
Nastavení portů:
- Záložka "Ports":
- Nastavte UART port, na kterém je připojen váš přijímač (např. UART3), a povolte "Serial RX".
- Nastavte UART port pro telemetrii, pokud ji používáte (např. UART6) a povolte odpovídající periférii (např. "TBS SmartAudio" nebo "IRC Tramp").
- Klikněte na "Save and Reboot".
- Záložka "Ports":
-
Nastavení přijímače:
- Záložka "Configuration":
- V sekci "Receiver" nastavte "Serial-based receiver" a vyberte typ, který odpovídá vašemu přijímači (např. "SBUS" nebo "CRSF").
- Klikněte na "Save and Reboot".
- Záložka "Receiver":
- Ověřte, že ovladač je připojen a správně ovládá jednotlivé kanály (Throttle, Roll, Pitch, Yaw).
- V případě potřeby změňte "Channel Map" nebo "RC Interpolation".
- Klikněte na "Save".
- Záložka "Configuration":
-
Nastavení režimů letu a přepínačů:
- Záložka "Modes":
- Přidejte režimy letu (např. "ANGLE", "HORIZON", "ACRO") a přiřaďte je k přepínačům na ovladači.
- Přidejte další funkce jako "ARM", "BEEPER" nebo "FLIP OVER AFTER CRASH" a přiřaďte je k přepínačům.
- Klikněte na "Save".
- Záložka "Modes":
-
Nastavení PID a filtrování:
- Záložka "PID Tuning":
- Nastavte hodnoty P, I a D pro Roll, Pitch a Yaw podle doporučení výrobce (zpočátku můžete ponechat defaultní hodnoty) nebo podle vlastních zkušeností.
- V sekci "Filter Settings" nastavte filtry podle doporučení výrobce nebo podle vlastních zkušeností.
- Klikněte na "Save".
- Záložka "PID Tuning":
-
Nastavení OSD (On-Screen Display):
- Záložka "OSD":
- Povolte a upravte polohu jednotlivých prvků OSD podle svých preferencí (např. baterie, RSSI, čas letu, atd.).
- Klikněte na "Save".
- Záložka "OSD":
-
Zkontrolujte a otestujte dron:
- Odpojte dron od počítače.
- Zapojte baterii do dronu a ověřte, že všechny systémy fungují správně.
- Proveďte testovací let a doladění PID a filtrů podle potřeby.
- RPM filtry a jejich nastavení u regulátorů ESC s BlHeli_s:
Pokud chcete vylepšit letové vlastnosti svého FPV dronu a používáte levnější a dostupnější regulátory ESC s BlHeli_s je zde možnost nahrát do regulátoru firmware, který umožní zapnutí těchto pomocných filtrů v konfigurátoru Betaflight a jiných konfigurátorech.
Na této stránce se nachází online konfigurátor: https://esc-configurator.com/
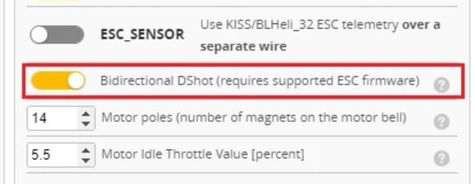
Připojení koptéry probíhá stejně jako na ostatních verzích programů tzn. připojení ke konfigurátoru je možné pouze se zapnutým dronem k pohonné baterii přes USB konektor řídící desky FC. Vybereme správný port ( COM ) většinou označený jako Betaflight a dáme připojit. Po připojení zmáčkneme příkaz READ SETTINGS. Zde vidíme již nastavení jednotlivých regulátorů ( v případě 4in1 ESC jsou zde 4 položky ). Klikneme na příkaz FLASH ALL, kde vybereme BLUEJAY jako verzi FW, Typ protokolu regulátoru se vyplní sám, označíme poslední verzi FW a vybereme PWM motorů ( pro race 24khz, pro freestyle a cinema drony 48khz a pro whoopy 96khz ) - Zápis FW potvrdíme příkazem FLASH - update FW regulátorů vidíme v reálném čase na obrazovce monitoru. Po jeho dokončení lze koptéru odpojit od konfigurátoru příkazem DISCONNECT. Tímto máme již možnost připojit konfigurátor Betaflight, kde v záložce MOTORS označíme jako aktivní volbu Bidirectional Dshot. Pro správnou funkci RPM filtrů musíme uvést i správný počet magnetů motoru a potvrdíme tlačítkem Save and Reboot. Tímto máme aktivované RPM filtrování. Aktualizací FW se též změní melodie regulátorů při zapnutí pohonné baterie ke konektoru dronu.
- Základní podmínkou pro bezpečné chování dronu a jeho čistý letový projev je dodržení správných montážních postupů každého komponentu zvlášť.
Vibrace jsou skutečným problémem kvůli výkonnějším motorům, rychlejšímu PID algoritmu a vzorkovací frekvenci gyra FC. Hlavním cílem je snížit množství mechanického šumu z motorů vstupujících do FC/Gyra během letu buď již přiloženým montážním materiálem v balení FC tzv: softmount (gumový materiál) nebo jiným typem.
Typy softmountů FC/ESC:
- Antivibrační sloupky M2/M3
- 3D tištěné držáky TPU
- Silikonový O-kroužek
- Průchodky (redukce z M3-M2 apod)
- Pěnová páska
Softmount motorů se nedoporučuje. Zde se vyřeší částečně jeden problém s přenášením vibrací od motorů do rámu, ale řada dalších problémů tímto vznikne.
- Ladění PID hodnot a filtrů FPV dronu v Betaflight konfigurátoru může být náročný proces, ale s tímto základním návodem se vám to snadno podaří. Postupujte podle následujících kroků:
Příprava:
- Ujistěte se, že váš dron je vybaven nejnovější verzí firmware Betaflight.
- Zálohujte si své současné nastavení v Betaflight konfigurátoru (CLI -> "diff all" -> zkopírujte a uložte výstup).
- Před zahájením ladění se ujistěte, že váš dron je v dobrém stavu, všechny komponenty jsou upevněny a že máte nové vrtule.
Krok 1: Ladění filtrů
- Připojte váš dron k Betaflight konfigurátoru a přejděte na záložku "PID Tuning".
- V sekci "Filter Settings", nastavte všechny filtry na výchozí hodnoty nebo použijte přednastavené filtry pro váš dron (pokud je dáno výrobcem).
- Proveďte zkušební let a zkontrolujte, zda nedochází k přehřívání motorů. Pokud se motory přehřívají, zvyšte hodnoty filtrů na slideru o jednu hodnotu a zkuste to znovu.
Krok 2: Ladění PID hodnot
- V záložce "PID Tuning", začněte s laděním hodnot P, I a D pro každou osu (Roll, Pitch a Yaw) jednotlivě.
- Začněte s hodnotami P. Zvyšujte hodnoty P, dokud nedosáhnete mírného oscilování. Poté hodnoty P snižte o 10-20 % pro zajištění stability.
- Nastavte hodnoty I tak, aby byly dostatečně vysoké pro udržení orientace dronu během manévrů, ale ne tak vysoké, aby způsobovaly přetáčení.
- Ladění hodnot D je klíčové pro účinné tlumení oscilací. Zvyšujte hodnoty D, dokud nedosáhnete hladkého letu (v zatáčení) bez oscilací. Pokud se motory přehřívají, snižte hodnoty D.
Krok 3: Jemné doladění
- Po nastavení základních PID hodnot, proveďte další zkušební lety a kontrolujte chování dronu. V případě potřeby upravte hodnoty PID pro dosažení optimálního letového projevu.
- Nyní můžete přejít k jemnému doladění filtrů. Pokud jste si jisti, že váš dron létá dobře, můžete postupně snižovat hodnoty filtrů pro zvýšení výkonu a reakce. Ujistěte se, že pravidelně kontrolujete teplotu motorů.
Krok 4: Uložení nastavení
- Po dokončení ladění a doladění PID hodnot a filtrů, nezapomeňte uložit své nastavení v Betaflight konfigurátoru.
- Proveďte závěrečný testovací let, abyste se ujistili, že váš dron létá podle očekávání.
Důležité upozornění: Ladění PID hodnot a filtrů je pokročilý proces a vyžaduje zkušenosti s FPV drony. Pokud nejste zkušený, doporučujeme konzultovat s odborníkem. Při nesprávném postupu nebo nastavení špatných hodnot může dojít k poškození elektroniky dronu nebo motorů.



